




Лазеранализ и обработка на сигнали за дистанционно разпознаване на реч
Декодиране на сигнален шум: анализ на сигнала и обработка на лазерно дистанционно разпознаване на реч
В удивителната сфера на технологиите, лазерното дистанционно разпознаване на реч е като красива симфония, но тази симфония има и свой собствен „шум“ – сигнален шум. Подобно на неочаквано шумна публика на концерт, шумът често е смущаващ влазерно разпознаване на речСпоред източника, шумът от лазерно дистанционно детектиране на речеви сигнали може грубо да се раздели на шума, внесен от самия лазерен инструмент за измерване на вибрации, шума, внесен от други източници на звук в близост до целта за измерване на вибрациите, и шума, генериран от смущения в околната среда. Детекцията на реч на дълги разстояния в крайна сметка трябва да получи речеви сигнали, които могат да бъдат разпознати от човешкия слух или машините, и много смесени шумове от външната среда и системата за детектиране ще намалят чуваемостта и разбираемостта на получените речеви сигнали, а разпределението на честотната лента на тези шумове частично съвпада с разпределението на основната честотна лента на речевия сигнал (около 300~3000 Hz). Те не могат просто да бъдат филтрирани с традиционни филтри и е необходима допълнителна обработка на откритите речеви сигнали. В момента изследователите изучават основно шумопотискането на нестационарен широколентов шум и ударен шум.
Широколентовият фонов шум обикновено се обработва чрез метод за краткосрочна оценка на спектъра, метод на подпространство и други алгоритми за потискане на шума, базирани на обработка на сигнали, както и традиционни методи за машинно обучение, методи за дълбоко обучение и други технологии за подобряване на речта, за да се отделят чистите речеви сигнали от фоновия шум.
Импулсният шум е спекл шум, който може да бъде въведен от динамичния спекл ефект, когато местоположението на целта на детектиране е нарушено от светлината на детекторната система на LDV. Понастоящем този вид шум се премахва главно чрез откриване на мястото, където сигналът има висок енергиен пик, и заместването му с прогнозираната стойност.
Лазерното дистанционно разпознаване на глас има перспективи за приложение в много области, като например прихващане, многорежимно наблюдение, откриване на проникване, търсене и спасяване, лазерен микрофон и др. Може да се предвиди, че бъдещата тенденция в изследванията на лазерното дистанционно разпознаване на глас ще се основава главно на (1) подобряване на производителността на измерванията на системата, като чувствителност и съотношение сигнал/шум, оптимизиране на режима на разпознаване, компонентите и структурата на системата за разпознаване; (2) подобряване на адаптивността на алгоритмите за обработка на сигнали, така че технологията за лазерно разпознаване на реч да може да се адаптира към различни разстояния на измерване, условия на околната среда и цели за измерване на вибрации; (3) по-разумен избор на цели за измерване на вибрации и високочестотна компенсация на речеви сигнали, измерени върху цели с различни характеристики на честотния отговор; (4) подобряване на структурата на системата и допълнително оптимизиране на системата за разпознаване чрез
миниатюризация, преносимост и интелигентен процес на откриване.
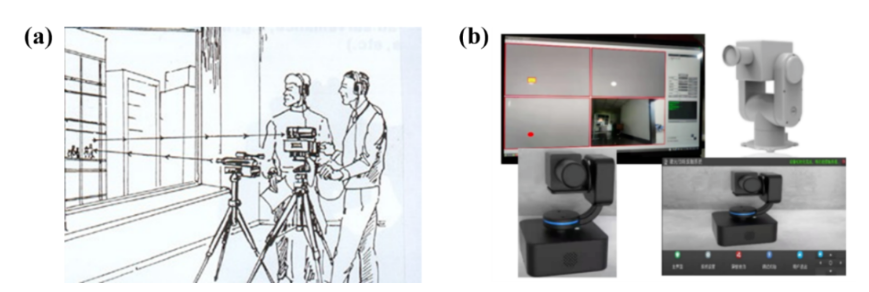
ФИГ. 1 (а) Схематична диаграма на лазерно прихващане; (б) Схематична диаграма на лазерната система против прихващане
Време на публикуване: 14 октомври 2024 г.